Система выпуска и выборки линейных антенн на атомных подводных лодках типа "Эстьют" ВМС Великобритании (2019)
В. Спиридонов,
кандидат технических наук
Применение буксируемой линейной антенной решетки на подводной лодке (ПЛ) обеспечивает система ее выпуска и выборки - TAHS (Towed Array Handling System). Основные требования, предъявляемые к ней, - это надежность, простота установки и эксплуатационные качества, не ухудшающие тактико-технические характеристики ПЛ или исключающие значительное перепроектирование ее основных корпусных конструкций.
Намотка буксируемых линейных антенн с кабелями, имеющими разные диаметры и встроенные электронные модули, требует особого внимания, так как при проведении выпуска и выборки антенны происходит износ и повреждение ее оболочки.
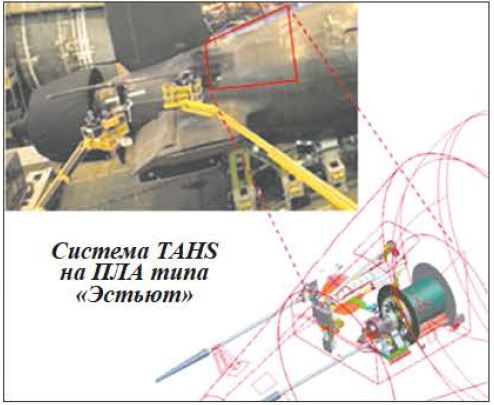 |
| Система TAHS на ПЛА типа "Эстьют" |
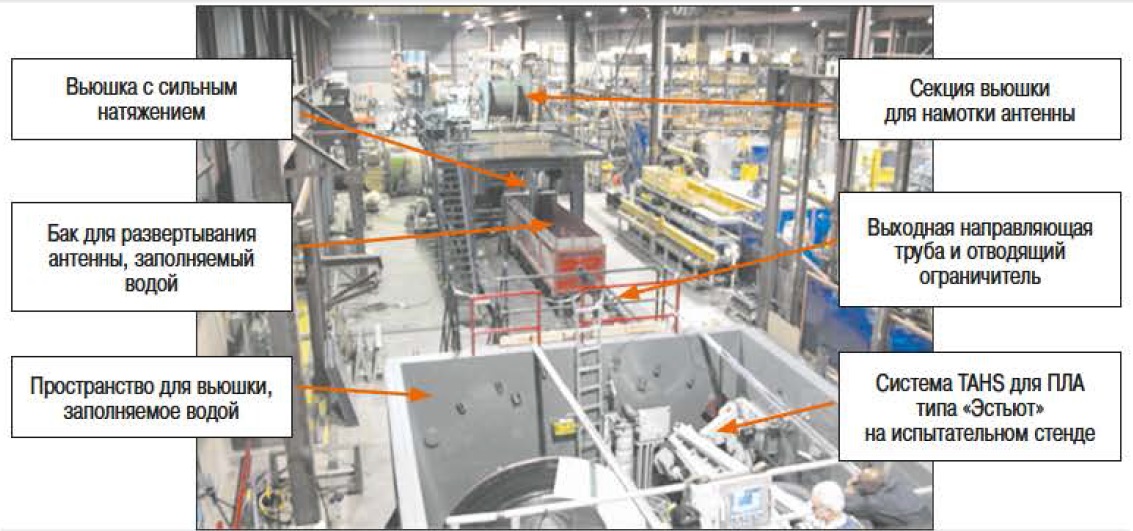 |
| Стендовые испытания системы TAHS для ПЛА типа "Эстьют" |
В 2010 году компания INDAL испытала новую систему TAHS для британской многоцелевой атомной подводной лодки (ПЛА) типа "Эстьют".
Она значительно отличается от предыдущих, устанавливаемых на ПЛА разного типа ВМС Великобритании, и предполагает такое сочетание устройств, которое обеспечивает автоматическое выравнивание витков при намотке и в целом безопасный выпуск антенны.
Испытания показали, что срок эффективной эксплуатации антенны может достигать 14 лет. При ее выпуске и выборке случаются повреждения, причиной которых является некорректная работа механических устройств или неправильная намотка. Из-за чрезмерного контактного давления направляющего ролика утончается внешняя оболочка материала антенны или кабеля.
Некачественная намотка может повредить как кабель, так и антенну.
Заклинивание кабеля между витками предыдущего слоя приводит к резкому увеличению сил трения и давления витков друг на друга, а их перекрещивание - к созданию точек напряжения. В случае наличия в модулях антенны жидкости их заклинивание и перекрещивание чревато повреждениями оболочки. Однако самыми опасными для нее являются многоярусные наложения или соскальзывания с изгибом, наиболее часто происходящие у фланцев вьюшки, когда антенна наматывается на последнюю неравномерно и с перекосом.
Если процесс не прекращается, то это приводит к преждевременному износу оболочки и вытеканию жидкости.
Организация намотки. Одним из ранних решений этого вопроса было нанесение на вьюшку пазов (бороздок), обеспечивающих фиксацию в них кабеля. В то же время намотанный первый слой часто использовался как спиралеобразный паз, который представлял собой сравнительно прямую линию по отношению к механизму намотки на вьюшку. Поскольку желобки расположены параллельно, то и витки последующих слоев ложатся друг за другом. Такая схема намотки витков для множества слоев была разработана после Второй мировой войны.
При увеличении количества слоев наблюдается тенденция к их неравномерности, и в итоге возникают проблемы, упомянутые выше.
Аргументы в пользу изменяемого по времени наматывания троса. Наматывание на вьюшку троса, как правило, рассматривается как фиксированный процесс, где устройство, управляющее укладкой, движется с той же скоростью, что и вьюшки и параллельно пазам.
При намотке второго слоя небольшое запаздывание по времени будет способствовать "уводу" троса в сторону фланца вьюшки, создавая тем самым перегиб и напряжение в нем. Это воздействие часто называют проскальзыванием с изгибом (riding turn), или изгибом при вращении с проскальзыванием. Даже намотка по прямой линии, обеспечивающая желаемое положение витков, также не может исключить вращения с проскальзыванием (трением) вдоль фланца.
Вариант, гарантирующий, что трения о фланец не произойдет и напряжения с изгибом не случится, - это намотка второго слоя за счет более раннего перехода по времени, то есть до касания фланца.
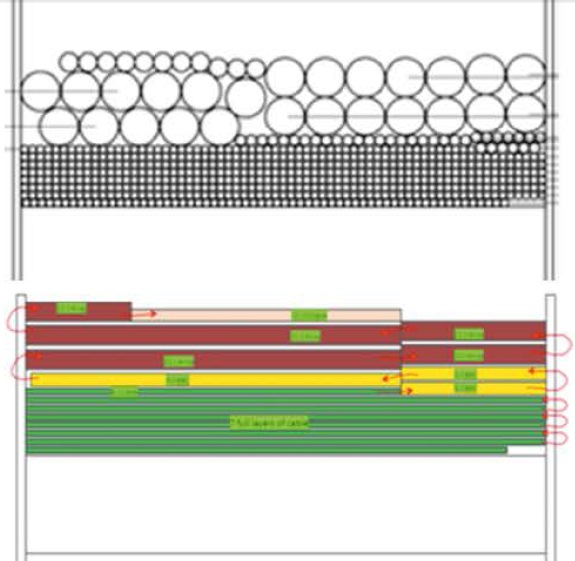 |
| Укладка кабеля и антенн, имеющих три секции с разными диаметрам |
Датчики и намотка - нос/корма. При намотке кабелей и антенн с различными диаметрами возникает проблема с датчиками, оценивающими процесс. В данной ситуации шкив намотки или направляющий ролик (нос/корма) расположен рядом с вьюшкой и датчики должны оценивать диаметр кабеля за счет измерения расстояния, на которое сместились ролики при прохождении между ними кабеля другого диаметра.
Непараллельный блок роликов управления укладкой.
Такой вариант управления используется для адаптации к разным диаметрам тросов. Кабель меньшего диаметра проходит в противоположной стороне блока роликов в зависимости от направления его перемещения.
Укладка кабелей двух разных диаметров. Обычно меньший диаметр укладывается первым и более плотно. Ввиду того что длина кабеля не совсем соответствует количеству шлагов, случаются сбои в количестве слоев и качестве укладки. Вот почему требуется проведение экспериментов, в ходе которых определяется длина тросов, обеспечивающих полное и точное заполнение слоя витками. Этот подход используется и при намотке множественного варианта кабелей и антенн с большой разницей в диаметрах.
Перемещаемый угловой сенсор. При определении угла наклона каната по отношению к оси вьюшки используется валик небольшого диаметра, снабженный прижимной пружиной для обеспечения упора в трос.
Кабель естественным образом движется по канавкам на вьюшке. В начале намотки первый виток имеет прямую линию и угол 0°.
Затем (следующие витки начали касаться друг друга на вьюшке при отходе их от фланца) угол наклона троса увеличивается до установленного предела и система управления намотки подает команду на дальнейшее движение. Данная операция повторяется, когда витки доходят до противоположного фланца.
Макропривод. В его схеме устройство управления намоткой регулирует процесс от одного края вьюшки (фланца) до другого, получая соответствующие сигналы от электронного блока управления.
С помощью электронного устройства отслеживается позиция вьюшки, и соответствующие данные выдаются на контролер, а также определяется местоположение очередного витка в обоих случаях. Как часть системы намотки проектантами вырабатывается таблица оптимального местоположения каретки-укладчика для каждой нарастающей длины кабельной укладки на вьюшку. В процессе функционирования системы кареткаукладчик смещается в сторону соответствующей позиции сообразно имеющейся эталонной таблице.
Макропривод, располагающий функцией самообучения. Система будет укладывать виток с учетом параметров выработанной оптимальной эталонной таблицы (график функционирования).
На начальном этапе работы оператор (контроллер) подстраивает укладку, основываясь на зарегистрированных отклонениях от табличного показателя, и таким образом оптимизирует работу всей системы. Она, в свою очередь, запоминает поправку и продолжает работу до тех пор, пока не будет зарегистрировано очередное отклонение, которое также будет внесено в таблицу.
Работа указанного макропривода. На одном из снимков показано несколько слоев буксирного кабеля, последовательно намотанного на вьюшку, будто бы параллельная структура образована за счет канавок на вьюшке. Переход у фланцев выполнен безупречно. В конкретном случае наиболее сложным и важным является этап намотки при переходе от троса к плавно меняющемуся в диаметре конусообразному сегменту, служащему переходным элементом между тросом и антенной (он не виден, так как расположен за вьюшкой), а затем - самой антенны.
Для достижения необходимого перехода при плавном изменении диаметров (от троса к антенне) контроллер намотки функционирует более динамично при намотке этого промежуточного сегмента с переменным диаметром, а затем возвращается в режим плотной намотки самой антенны с ее фиксированным диаметром.
Надежность и эффективность новой системы выпуска и выборки буксируемых линейных антенн на многоцелевых атомных подводных лодках типа "Эстьют" ВМС Великобритании были подтверждены в ходе морских испытаний. При этом основная цель - снижение повреждений антенны ПЛ, длительное время находящейся под водой, была достигнута.