Корабельные радиолокационные станции SMART-L И SMART-L MМ/N ч2 (2023)
Подполковник Е. Леонов,
Д. Храмов
В первой части статьи* рассказывалось о корабельной РЛС SMART-L, разработанной компанией "Сигнаал аппаратен" (сейчас "Талес") в середине 1990-х годов по заказу МО Нидерландов и предназначенной для контроля воздушной обстановки на больших дальностях в корабельной системе ПВО. Она обеспечивает поиск, обнаружение и сопровождение воздушных целей, выработку целеуказаний корабельным зенитным ракетным комплексам, истребительной авиации и средствам радиоэлектронной борьбы.
Создание корабельной радиролокационной станции SMART-L MM/N для противоракетной обороны (ПРО). Контракт на разработку новой станции был заключен в июне 2012 года между управлением материально-технического обеспечения МО Нидерландов и компанией "Талес". Помимо этого он предусматривал изготовление четырех образцов для замены станций SMART-L на ФР УРО типа "Де Зевен Провинсиен", их установку на кораблях, модернизацию корабельных систем боевого управления "Гардиан" и систем обмена данными. Совершенствование радиоэлектронного вооружения указанных фрегатов позволит расширить круг решаемых ими задач, позволяя задействовать эти корабли для решения разведывательно-информационных задач в системе ПРО НАТО.
 |
| Корабельная РЛС SMART-L MM/N |
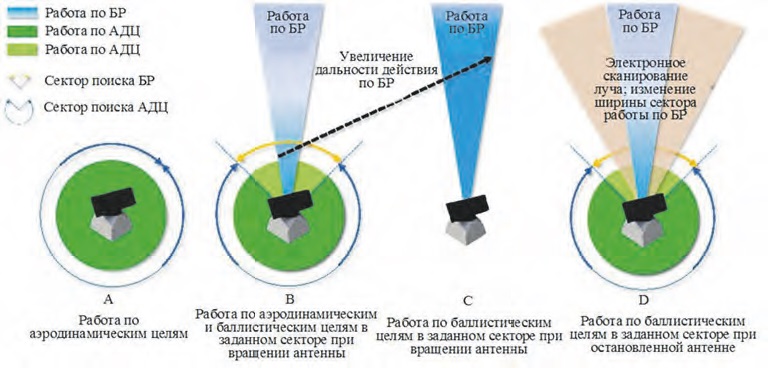 |
| Режимы работы корабельной РЛС SMART-L MM/N |
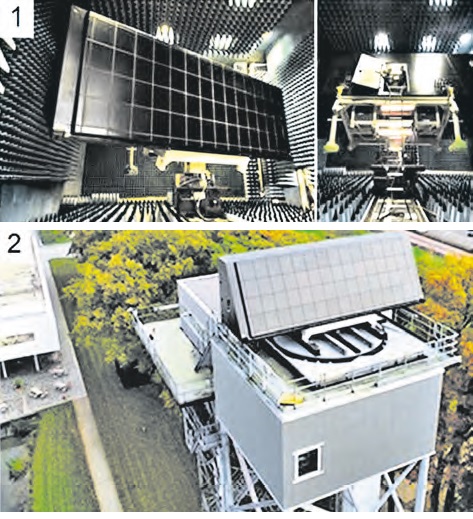 |
| Макет активной фазированной антенны РЛС SMART-L MM/N: 1 – в измерительном комплексе (г. Хелдер, Нидерланды); 2 – на испытательной вышке |
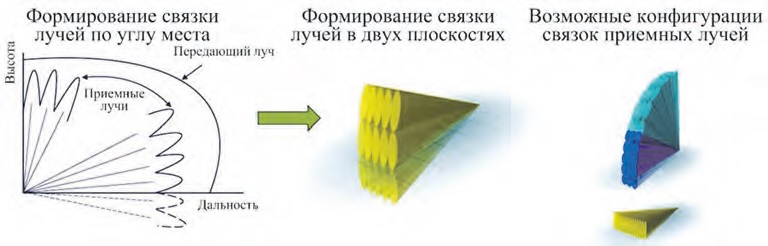 |
| Варианты цифрового формирования многолучевых приемных диаграмм направленности |
 |
| Изображение радиолокационной обстановки на дисплее РЛС SMART-L MM/N на дальности 2 000 км (белыми значками обозначены космические аппараты) |
 |
| Компьютерное изображение траекторий движения космических аппаратов системы спутниковой связи "Иридиум" и сопровождения одного из них станцией SMART-L MM/N |
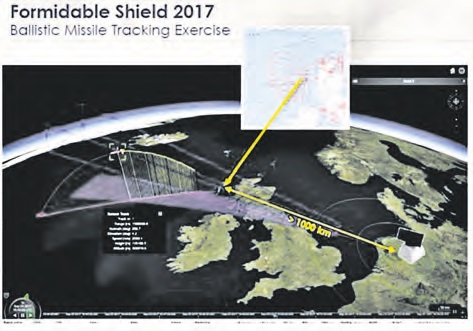 |
| Расположение РЛС SMART-L MM/N относительно места пуска ракеты-мишени в ходе учений "Надежный щит" и траектория ее полета |
 |
| Изображение обнаружения баллистической ракеты-мишени на дисплее |
Модернизация всех четырех ФР УРО типа "Де Зевен Провинсиен" ВМС Нидерландов должна была завершиться до конца 2022 года. Не исключается также, что новые РЛС войдут в состав вооружения трех ФР УРО типа "Заксен" ВМС Германии и минимум одного типа "Ивер Хьюитфельд" ВМС Дании. Первый германский фрегат планируется переоборудовать в 2023–2024 годах в ходе планового ремонта.
РЛС SMART-L MM/N предназначена для обнаружения и сопровождения баллистических ракет (БР), воздушных и надводных целей. Первичное обнаружение баллистических целей осуществляется самостоятельно, без внешнего целеуказания. Станция может формировать данные целеуказания корабельным и наземным комплексам ПРО, а также обеспечивать информацией стреляющий корабль в режиме применения противоракет "пуск по внешним данным".
В данной РЛС предусмотрено четыре основных режима работы (далее – режимы А, B, C и D). Режим A позволяет осуществлять обзор воздушного пространства, обнаруживать и сопровождать аэродинамические цели (АДЦ) на дальности до 480 км при вращении антенны.
Режимы B и C предназначены для обнаружения и сопровождения воздушных целей (ВЦ) и БР при вращении антенны, при этом работа по баллистическим ракетам ведется только в пределах назначенного сектора по азимуту. В режиме B (совмещенном) станция работает по двум типам целей одновременно, формируя для обнаружения БР передающий луч барьерного типа. Важными условиями эффективной работы по разнотипным целям в одном секторе являются планирование решаемых задач (например, обнаружение новой ВЦ на границе зоны действия, уточнение траектории и другие) и распределение рабочего времени станции между задачами. Эти функции выполняются автоматически в процессе работы РЛС. Вмешательство оператора предполагает возможность корректировать приоритетность задач.
В режиме C в пределах назначенного сектора отслеживаются только баллистические цели, при этом высвободившийся ресурс (ввиду отказа от работы по ВЦ), используется для наращивания дальности действия по БР. В режиме D, обеспечивающем обнаружение и сопровождение БР, станция работает при неподвижной антенне. Радиолокатор осуществляет обзор пространства и обнаружение целей в секторе до 90°, а сопровождение – до 120° по азимуту. При вращении антенны новые данные о целях поступают в соответствии с его темпом – каждые 5 с; при неподвижной антенне имеется возможность регулировать период обновления информации и устанавливать его равным 5 либо 2 с.
Разработка РЛС SMART-L MM/N осуществлялась по двум направлениям: непосредственно элементов самой механической конструкции, итогом чего стало создание нового облегченного каркаса для антенной решетки и панелей охлаждения, а также цифровой АФАР и ее электронных компонентов. Для снижения технических рисков был собран макет станции, который включал в себя частично заполненную (1 344 излучателя) приемо-передающими модулями антенную решетку. Характеристики цифровой активной фазированной решетки были проверены в измерительном комплексе разработчика в г. Хелдер (Нидерланды) и после этого макет был установлен без поворотного основания на испытательную вышку (г. Хенгело, Нидерланды).
Цифровая активная фазированная решетка РЛС состоит из 56 панелей, каждая из которых образована платой охлаждения с закрепленными на противоположных ее поверхностях панелью излучателей и 28 приемо-передающими модулями. Передающие каналы модулей содержат усилители мощности, изготовленные на базе нитрида-галлия. Общее количество излучающих элементов в решетке превышает 1 000 единиц, при этом мощность излучения одного элемента составляет около 100 Вт. Построение антенны в варианте активной ФАР позволило увеличить среднюю мощность излучения в 2 раза и уменьшить внутренние потери в станции при передаче и преобразовании сигнала. Таким образом, суммарный выигрыш в отношении "сигнал/шум", которого удалось добиться за счет перехода к активной ФАР, составляет около 10 дБ.
Каждый излучающий элемент новой антенной решетки связан с отдельным фазовращателем. Это дает возможность перемещать передающий луч по азимуту и по углу места, а также, при необходимости, расширять его как отдельно по каждой из этих координат, так и одновременно по двум, облучая зондирующим сигналом область пространства по азимуту и углу места.
При приеме за счет цифровой обработки формируется многолучевая диаграмма направленности антенны (ДНА).
В отличие от РЛС SMART-L формирование лучей может осуществляться одновременно в двух плоскостях – азимутальной и угломестной, за счет чего удалось повысить точностные характеристики станции. Приемные лучи ДНА без потерь в разрешающей способности и точности измерений формируются в границах пространственного сектора, охватываемого передающим лучом.
Цифровая АФАР, как и АФАР с аналоговым формированием лучей при приеме, обеспечивает быструю переброску луча в заданное направление, что позволяет увеличить время, в течение которого станция может "наблюдать" цели, сократив при этом время перехода от их обнаружения к сопровождению, а также более высокую частоту обновления координат ВЦ для более точного определения параметров их траекторий.
Габаритные размеры антенной решетки новой РЛС не изменились. Кроме того, внешне она практически не отличается от варианта на станции SMART-L. Масса антенны увеличилась примерно на 10% (около 9 т), что обусловлено построением антенной решетки в варианте АФАР. Для того чтобы не допустить дополнительного роста массы, для антенной решетки был разработан новый каркас, в котором несущая рама изготовлена из алюминиевых сплавов. В антенную систему из-под палубы переместили систему контроля температуры и влажности.
Другой важной особенностью этой РЛС является наличие нового поворотного устройства для антенны, которое обеспечивает ее вращение в любом направлении с разными скоростями. По заявлениям представителей компании-разработчицы, это позволяет точно сориентировать узкий сектор электронного сканирования решетки относительно ракетоопасных направлений для работы станции с неподвижной антенной. Отмечается также, что для предотвращения выхода сопровождаемой цели за пределы сектора электронного сканирования предусмотрен режим вращения решетки с уменьшенной скоростью, благодаря чему сектор электронного сканирования решетки перемещается вслед за движением цели. Кроме того, РЛС, работая при вращающейся антенне, может на некоторое время остановить ее, обследовать узкий сектор на предмет обнаружения БР и продолжить работу при вращении антенны.
В случае установки новой РЛС на действующий корабль для замены станции SMART-L необходимо демонтировать стойки передатчика и волноводный тракт.
В составе SMART-L MM/N под палубой будут размещаться только одна стойка системы формирования приемных диаграмм направленности и цифровой обработки сигналов, устройство управления приводом и некоторые вспомогательные приборы. Для передачи/приема данных на антенную решетку применяется оптоволоконный кабель, охлаждающая жидкость на антенну поступает через вращающийся переход. В результате, несмотря на увеличение массы антенной решетки, общая масса новой РЛС по сравнению со SMART-L, а также объемы занимаемых ее аппаратурой помещений под палубой значительно уменьшатся. Кроме того, отмечается, что увеличение массы антенной системы ведет лишь к незначительному смещению центра тяжести корабля.
Применяемый в новой РЛС SMART-L MM/N зондирующий сигнал, предназначенный для обнаружения и сопровождения БР, содержит группы импульсов (более 10 в одной), излучаемых через нерегулярные промежутки времени.
Время, отводимое на прием отраженных сигналов, возросло. В отличие от зондирующего сигнала, применяемого в станции SMART-L для обнаружения и сопровождения воздушных и надводных целей, этот не содержит импульсы для измерения помех и освещения надводной обстановки. Новый сигнал позволяет измерять радиальную скорость цели в каждом зондировании, а также однозначно определять дальность и скорость объекта в широком диапазоне изменения этих параметров.
Сигнал разрабатывался на этапе проработки режима "Елр" для РЛС SMART-L.
С 2006 года, когда в ходе описанных в первой части статьи морских испытаний впервые оценивался этот режим, существенно улучшились характеристики средств обработки радиолокационной информации, что позволило применить в новой станции более совершенные алгоритмы извлечения информации из отраженных сигналов.
Количество цифровых приемных каналов в РЛС SMART-L MM/N многократно возросло и превышает 1 000, в то время как в SMART-L их всего 24. Общий поток информации, поступающей с приемных каналов новой станции на вход системы обработки, по величине эквивалентен потоку одновременно с 50 DVD-дисков. Для обработки всей этой информации в состав системы обработки новой РЛС были введены вычислительные системы "Тесла" на базе графических процессоров.
Архитектура средств обработки радиолокационной информации РЛС SMART-L MM/N построена на основе единых унифицированных принципов SR3D (generic SR3D platform), принятых в компании "Талес" при создании станций наземного и корабельного базирования. Реализация этих принципов позволила "развязать" ее аппаратную и программную части, то есть, по существу, вносить изменения в аппаратное обеспечение, не меняя программное, и наоборот.
Представители компании указывают, что в результате была создана станция с так называемой открытой архитектурой, функциональные возможности которой могут расширяться, а рабочие характеристики улучшаться исключительно за счет обновления программного обеспечения.
Из-за высокой сложности радиолокационных станций с цифровыми АФАР, насыщенности разного вида аппаратурой при их создании большое внимание уделяется вопросам контроля и диагностики функционирования. В состав РЛС вводится большое количество датчиков, отслеживающих разные параметры, например, температуру охлаждающей жидкости или силу электрического тока, питающего двигатель, вращающий антенную систему РЛС. В SMART-L MM/N имеется около 1 100 источников непрерывных сигналов, к которым относятся датчики, и до 19 тыс. источников дискретных сигналов. В процессе работы станции формируется большой массив изменяющихся во времени данных, поступающих от разных источников с различной периодичностью.
Некоторые данные сохраняются только в том случае, когда они существенно отличаются от своих предыдущих значений.
Непрерывные сигналы обрабатываются с помощью двух отдельных программ. Первая из них – программа самоконтроля – выдает предупреждение, в том случае когда величина сигнала превышает заданный уровень. Она занимается поиском источника проблемы, а при поступлении нескольких предупреждений группирует их и определяет возможные причины. Она выполняет свою работу частично на основе заложенных правил, а также – модели радиолокационной станции.
Вторая программа контролирует показания датчиков и фактически является обнаружителем аномальных значений. В настоящее время в ней реализован однопризнаковый алгоритм, который работает на основе статистической модели данных. Она выдает предупреждение оператору в тех случаях, когда вероятность появления определенной величины опускается ниже установленного порогового значения. В перспективе программу планируется усовершенствовать за счет добавления алгоритма многопризнакового анализа, который будет учитывать рабочее состояния, в котором находится РЛС, поскольку это существенно влияет на корректность его работы. Он также сможет выявлять корреляционные связи между различными показаниями.
Для получения информации о характеристиках SMART-L MM/N, накопления статистических данных об их работе, в качестве целей служат действующие космические аппараты.
Так, станция обеспечивала проводку аппарата системы спутниковой связи "Иридиум". Его траектория пролегала на высоте около 700 км при максимальном удалении от РЛС 2 000 км. В зарубежной печати также сообщалось о сопровождении SMART-L MM/N космического корабля "Крю Дрэгон" и второй ступени выводившей его ракеты "Фалкон-9".
Первые экспериментальные данные о характеристиках SMART-L MM/N при работе по мишеням баллистических ракет были получены в ходе морских учений "Надежный щит", проводившихся в сентябре-октябре 2017 года в районе ракетного полигона МО Великобритании (арх. Гебридские о-ва, Атлантический океан).
Пуски мишеней БР средней дальности ("Терьер Ориол", дальность стрельбы до 1 000 км, максимальная высота траектории 300 км, максимальная скорость 3 000 м/с) выполнялись с о. Саут-Уист (арх. Гебридские о-ва) в западном направлении. Корабельная РЛС SMART-L MM/N находилась в 1 000 км юго-восточнее от места запуска мишеней и располагалась на вышке (г. Хенгело, Нидерланды). Она работала при неподвижной антенне.
В ходе одного из пусков РЛС обнаружила мишень сразу же после того, как та пересекла плоскость горизонта, и приступила к ее сопровождению. Ракета поднялась на высоту около 300 км и начала снижение. Радиолокатор сопровождал уходящую цель в течение 300 с, до того момента пока на расстоянии около 1 800 км она не скрылась за горизонтом.
По результатам учений было сделано заявление, что новая станция выдавала данные о движении ВЦ с незначительными ошибками, что в перспективе позволит задействовать ее для информационного обеспечения стрельбы противоракетами в режиме "пуск по внешним данным".
Этот режим стрельбы используется американскими ЭМ УРО, оснащенными системой "Иджис", и предполагает, что исходные данные для пуска ракеты формируются на борту стреляющего корабля на основе показателей сопровождения, поступающих с определенной периодичностью по линии связи от внешнего источника информации; цель находится за пределами зоны действия бортовых средств освещения обстановки стреляющего корабля, то есть в момент старта противоракеты остается для него "невидимой".
Задача пуска противоракеты в режиме "пуск по внешним данным" отрабатывалась в рамках учений "Надежный щит" в 2021 году, когда установленная на ФР УРО "Де Зевен Провинсен" SMART-L MM/N автономно, без внешнего целеуказания, обнаружила мишень баллистической ракеты (максимальная скорость 3 км/с, высота в апогее более 300 км) и сопровождала ее свыше 5 мин. Полученные данные передавались на американский ЭМ УРО "Пол Игнатиус", с которого был выполнен пуск противоракеты "Стандарт-3". Мишень была поражена за пределами атмосферы, а испытания признаны успешными.
Следует отметить, что состоялись эксперименты, в ходе которых дальность действия станции SMART-L MM/N превысила 2 000 км. Продолжается работа над новой модификацией программного обеспечения для этой РЛС, внедрение которого существенно увеличит ее дальности действия.
Так, по оценкам зарубежных специалистов, дальность обнаружения БР корабельной РЛС SMART-L MM/N может достигать 1 800 км при вращающейся антенне и до 4 000 км при неподвижной.
Отдельно действующая РЛС SMART-L MM/N обеспечивает достаточно высокую точность измерения дальности и доплеровского смещения частоты, при этом зона ее действия ограничена. Специалисты компании "Талес" полагают, что потенциал новых станций может быть реализован в полной мере при интеграции нескольких в единую систему и создании пространственно-разнесенной сети РЛС. Это позволит значительно расширить границы контролируемой зоны, а также повысить точностные характеристики вырабатываемых данных сопровождения за счет объединения измерений отдельных РЛС в единую траекторию.
В интересах НАТО компания проводила эксперименты с использованием математических моделей, которые показали, что за счет совместной обработки данных, поступающих от нескольких РЛС, может быть повышена эффективность решения боевых задач и что в настоящее время для реализации соответствующей обработки имеются необходимые технические возможности. Совместная обработка данных в сети РЛС позволит нивелировать систематические ошибки в измерениях отдельных станций, а также задержки в каналах передачи данных, возникающие при обмене между абонентами сети. Надежность сопровождения целей при этом возрастет, а незначительные результирующие ошибки измерения координат, дальности и скорости цели позволят применять получаемые при совместной обработке данные для стрельбы ЗУР в режиме "пуск по внешним данным".
Таким образом, за рубежом разработано новое поколение корабельных радиолокационных станций освещения обстановки на основе цифровых активных фазированных решеток. РЛС SMART-L MM/N компании "Талес" обеспечивает работу по баллистическим ракетам. Вполне вероятно, что новой станцией будут вооружены четыре-восемь кораблей ВМС европейских государств – членов НАТО, которые смогут решать разведывательно-информационные задачи в создаваемых системах противоракетной обороны альянса, а также в глобальной ПРО США.
* Cм.: Зарубежное военное обозрение. – 2023. – № 1. – С. – 76–82.