Корабельные радиолокационные станции SMART-L и SMART-L MМ/N ч1 (2023)
Подполковник Е. Леонов,
Д. Храмоы
Корабельная радиолокационная станция (РЛС) освещения воздушной обстановки SMART-L. Такие РЛС обеспечивают поиск, обнаружение и сопровождение воздушных целей. Они вырабатывают данные целеуказания корабельным зенитным ракетным комплексам, истребительной авиации и средствам радиоэлектронной борьбы.
На вооружении надводных кораблей (НК) ВМС зарубежных государств находятся разнообразные двух- и трехкоординатные станции этого класса. В 1960–1980 годах применялись вращаемые антенные решетки с частотным и фазовым сканированием узкой диаграммы направленности антенны либо параболические антенны, а также передатчики, построенные на электровакуумных приборах.
На рубеже 2000-х годов на вооружение НК ВМС европейских государств поступило новое поколение РЛС. К главным их особенностям относятся: применение фазированных решеток с цифровой обработкой сигналов при формировании многолучевой диаграммы направленности в плоскости угла места, а также когерентных полупроводниковых передатчиков. Характерным представителем станций этого поколения является SMART-L.
Недавно на вооружение принята разработанная на ее основе SMART-L MМ/N, в состав которой входит цифровая активная фазированная решетка. Обе РЛС по своим ТТХ и реализованным техническим решениям определяют уровень развития зарубежного корабельного радиолокационного вооружения, в связи с чем заслуживают детального рассмотрения.
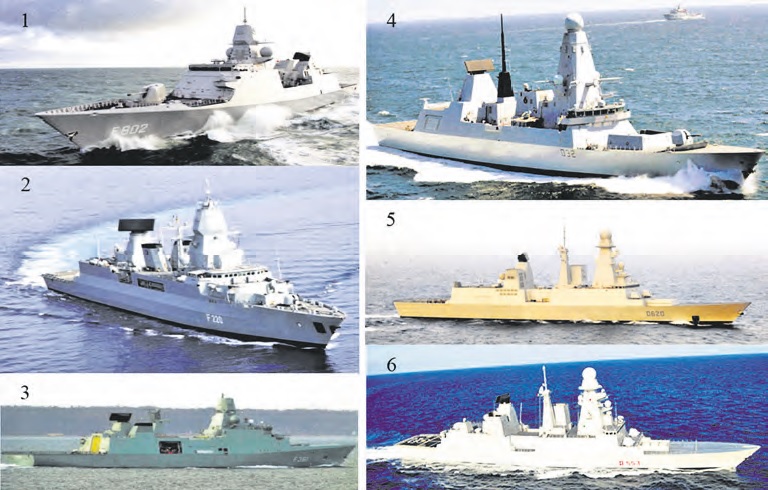 |
| Корабли ВМС стран НАТО с РЛС SMART-L (1–3) и S1850M (4–6): 1 – ФР УРО "Де Зевен Провинсиен" ВМС Нидерландов; 2 – ФР УРО "Гамбург" ВМС Германии; 3 – ФР УРО "Ивер Хьюитфельд" ВМС Дании; 4 – ЭМ УРО "Деринг" ВМС Великобритании; 5 – ЭМ УРО "Клод де Форбин" ВМС Франции; 6 – ЭМ УРО "Андреа Дориа" ВМС Италии |
 |
| Фазированная антенная решетка РЛС SMART-L |
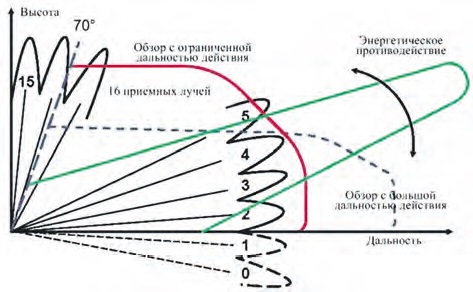 |
| Диаграммы направленности антенны РЛС SMART-L в вертикальной плоскости для различных режимов излучения |
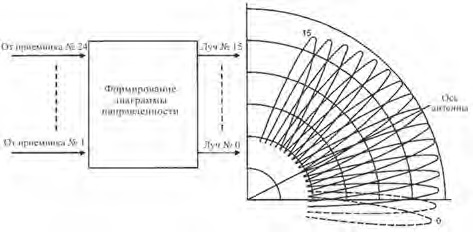 |
| Цифровое формирование приемной многолучевой диаграммы направленности антенны по углу места в РЛС SMART-L |
 |
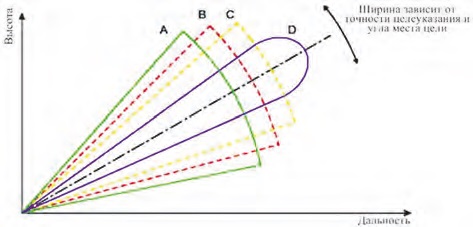
| Особенности измерения угла места низколетящей цели. На нижнем рисунке показаны формируемые в SMART-L дополнительные лучи |
 |
| Формируемые на передачу диаграммы направленности антенны в режиме "Бтс" |
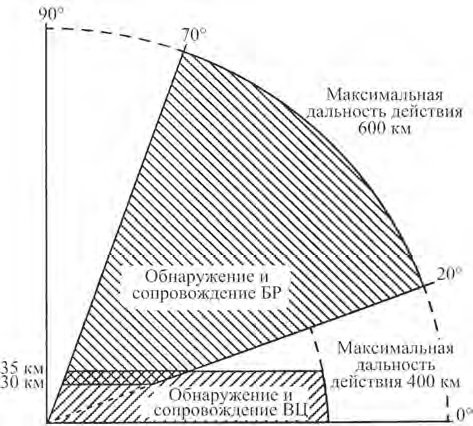 |
| Характеристики работы РЛС при обнаружении и сопровождении воздушных целей и баллистических ракет |
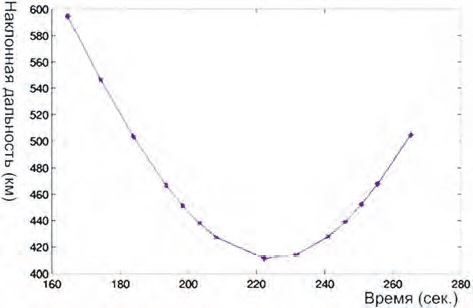 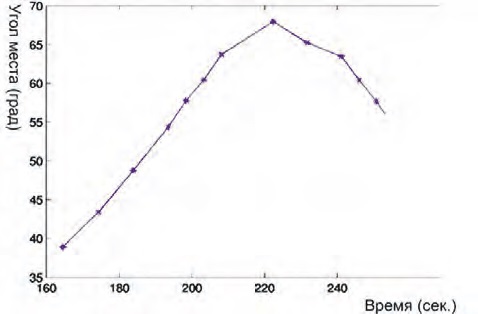 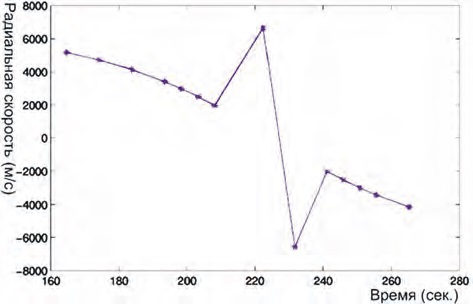 |
| Параметры движения цели (космической станции "Мир"), полученные при радиолокационном сопровождении корабельной РЛС SMART-L |
 |
| Схема испытаний с пуском ракеты-мишени "Арав-Б" |
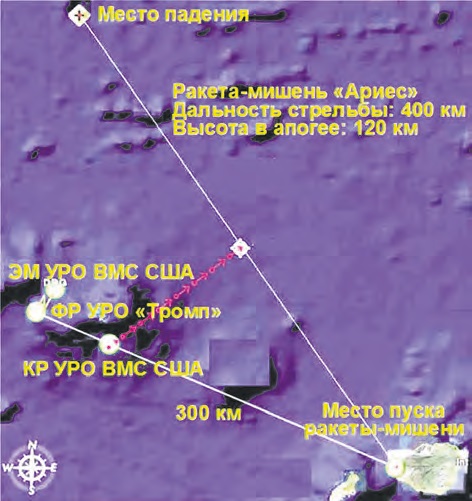 |
| Схема испытаний с пуском ракеты-мишени "Ариес" |
Корабельная РЛС SMART-L, разработанная компанией "Сигнаал аппаратен" (в настоящее время "Талес") в середине 1990-х годов по заказу МО Нидерландов, предназначена для контроля воздушной обстановки на больших дальностях в корабельной системе ПВО. В круг решаемых ею задач также входит: освещение надводной обстановки, обнаружение и распознавание вертолетов (в том числе при зависании), пассивный поиск целей, пеленгация источников активных помех и измерение уровней их сигналов. Такие функции, как обнаружение целей, переход к сопровождению, сопровождение и распознавание РЛС выполняет автоматически.
На основе этой станции была разработана S1850M. В настоящее время обе РЛС находятся на вооружении надводных кораблей класса фрегат (ФР) УРО ВМС Германии, Дании и Нидерландов, а также эскадренных миноносцев (ЭМ) УРО ВМС Великобритании, Италии и Франции (всего 20 НК шести типов).
Антенна станции SMART-L представляет собой вращаемую со скоростью 12 об./мин приемо-передающую плоскую фазированную антенную решетку (ФАР) шириной 8,8 м и высотой 4,4 м.
ФАР образована 24 горизонтально расположенными элементами, каждый из которых состоит из распределительной системы и 48 излучателей. Элементы объединены в четыре защищенные обтекателями секции. При излучении задействуется только 16 из них, а при приеме – все 24.
Процесс управления фазовым распределением в вертикальной плоскости в антенной решетке в режимах излучения и приема реализован разными способами при помощи различных устройств. Фактически в станции SMART-L эти процессы осуществляются независимо друг от друга, что позволяет оперативно изменять режим ее работы с учетом складывающейся обстановки и запросов потребителей радиолокационной информации.
В режиме излучения зондирующего сигнала для формирования диаграммы направленности антенны (ДНА) применяются фазовращатели. Они регулируют фазы излучаемых элементами сигналов в соответствии с командами, поступающими от системы цифровой обработки радиолокационных сигналов. В РЛС имеется несколько режимов, в каждом из которых границы рабочей зоны станции в вертикальной плоскости по дальности и высоте формируются за счет построения диаграммы направленности специального вида.
В режиме обзора с ограниченной дальностью действия, оптимизированном для обнаружения малозаметных противокорабельных ракет, формируется широкий в вертикальной плоскости луч, при этом большая часть излучаемой энергии направляется в верхнюю его часть. Режим обзора с большой дальностью действия предназначен для обнаружения воздушных целей, причем энергия излучения сосредотачивается в основном в нижней части луча при небольших углах места.
В обоих режимах ширина ДНА в вертикальной плоскости достигает 70°. Имеется также специальный режим энергетического противодействия, который предназначен для сопровождения воздушных целей, действующих под прикрытием постановщиков помех. Энергия излучения в этом случае концентрируется в узком луче шириной около 8°.
Переключение с одного режима на другой станция осуществляет автоматически, при переходе от одного сектора к другому в процессе вращения антенны либо по команде оператора.
Энергия зондирующего сигнала подводится к ФАР по волноводам от расположенного под палубой когерентного полупроводникового передатчика.
В его состав входят 32 усилителя, обеспечивающих выходную мощность около 100 кВт, при импульсной мощности одного в 4 кВт. В станции предусмотрено несколько возможных вариантов работы передатчика с различной выходной мощностью. При этом задействуется только часть усилителей. В передатчике формируется составной зондирующий сигнал, содержащий импульсы для оценки характеристик мешающих отражений, обнаружения надводных целей и последовательность импульсов, следующих со средней частотой повторения, для обнаружения аэродинамических целей. За время нахождения целей в луче диаграммы направленности антенны, определяемое скоростью ее вращения и шириной ДНА по азимуту, станция излучает три-пять зондирующих сигналов.
В режиме приема формирование диаграммы направленности происходит за счет цифровой обработки сигналов.
Такая задача решается на основе быстрого преобразования Фурье (на 24 точки, по количеству элементов решетки, участвующих в приеме сигналов) в специальном цифровом вычислителе – устройстве формирования ДНА. Это устройство формирует многолучевую ДНА, составленную из 16 частично-перекрывающихся ориентированных под разными углами места лучей, ширина каждого из которых равна в среднем 6,5°.
14 лучей ДНА охватывают сектор от 0 до 70°, в границах которого осуществляется обнаружение целей, измерение их координат и сопровождение. Измерение угла места целей, наблюдаемых в этих лучах, основано на методе интерполяции.
Чтобы снизить возможность ошибки при измерении угла места низколетящих целей, приняты специальные меры.
Как известно, она возможна в связи с многолучевым распространением отраженных от цели сигналов, когда при небольших углах места на антенну РЛС поступают прямые, то есть пришедшие непосредственно от цели, и переотраженные поверхностью моря сигналы. Интерполяционные методы измерения не позволяют в необходимой мере их разделить, в результате чего и возникает ошибка.
В РЛС SMART-L при цифровом формировании приемной ДНА в направлениях, соответствующих отрицательным углам места, создается два дополнительных луча. При определении угла места сигналы, принимаемые в этих дополнительных лучах, обрабатываются совместно с принимаемыми в соседних основных лучах. Применение такого метода снижает ошибку измерения до 1–3 мрад.
Последующая цифровая обработка радиолокационных сигналов, принимаемых в пределах отдельных лучей, предполагает формирование отметок воздушных и надводных целей, оценку мешающих отражений и их локализацию в пределах зоны действия РЛС (построение так называемой карты помех), выделение сигналов станций постановки помех. Отметки целей, содержащие информацию о координатах и их скорости, поступают в систему сопровождения. Для предотвращения ее перегрузки предусмотрена фильтрация отметок на предмет выявления отражений от птиц.
Траектории целей обнаруживаются и сопровождаются автоматически. Алгоритм обработки информации строится на базе многогипотезного фильтра.
В официальных источниках сообщается, что корабельная РЛС SMART-L способна обнаруживать и сопровождать баллистические ракеты отдельных классов и низкоорбитальные космические объекты. В 1994 году в ВМС Нидерландов была сформирована рабочая группа для изучения возможности привлечения создаваемых на тот момент ФР УРО типа "Де Зевен Провинсиен" к решению задач противоракетной обороны. Изучив особенности боевого применения ракет Р-17 "Скад" в войне в Персидском заливе (1991), специалисты пришли к заключению, что в эту РЛС в дополнение к основным режимам работы целесообразно ввести дополнительный с обзором ограниченного по углам места сектора для дальнего обнаружения баллистических ракет (БР).
Данное требование было выполнено за счет изменений в программно-алгоритмическом обеспечении РЛС и введения дополнительного режима работы "Бтс" (BTS – Basic TBM Search) – "обнаружение тактических баллистических ракет".
Этот режим предназначался для обнаружения и сопровождения баллистических целей в секторе от 20 до 70° по углу места за счет его обзора передающим лучом специальной формы. Новых типов зондирующих сигналов и алгоритмов обработки принятых "Бтс" не предусматривал. Были применены последовательности зондирующих импульсов со средней частотой повторения и соответствующая доплеровская обработка. Принятые меры, по мнению экспертов, должны были обеспечивать возможность обнаружения и сопровождения высоколетящих скоростных (скорость более 1 000 м/с) целей на дальности до 600 км.
В течение 1998 года проводились испытания нового режима и накопление экспериментальных данных. Для испытаний применялся наземный опытный образец станции SMART-L. В качестве целей для него задействовались космические аппараты различного типа, в том числе орбитальная станция "Мир". Траектория ее движения пролегала на удалении 400–600 км от РЛС, угол места изменялся в диапазоне от 40 до 70°, а радиальная скорость – от 6 до -6 км/с. Анализ полученных данных показал, что в них содержатся аномальные малоинформативные измерения, часть из которых были выполнены с ошибками, во много раз превышающими допустимые, либо вообще не содержали информации о цели (пропуски измерений). Кроме того, специалисты пришли к выводу, что эффективная дальность действия корабельной станции дальнего обнаружения баллистических ракет должна быть увеличена до 1 000 км и более.
Опираясь на результаты первых экспериментов по сопровождению космических аппаратов, в 2000 году был начат новый этап работ. На этом этапе ставилась задача увеличить дальность действия РЛС SMART-L до 1 000 км, при этом решение увеличить размеры антенны и мощность передатчика отвергалось в связи с жесткими ограничениями по массо-габаритным характеристикам и мощности, потребляемой от первичного источника электропитания, которые обусловлены размещением станции на боевом корабле. Для обеспечения требуемой дальности было решено ввести в РЛС отдельный канал обнаружения и сопровождения баллистических ракет (БР), который в режиме передачи реализовывался за счет излучения специального зондирующего сигнала, а в режиме приема – доплеровской обработки отраженных сигналов.
Новый режим, получивший наименование "Елр" (ELR – Extended Long Range search) – "обнаружение баллистических ракет на большей дальности", должен был обеспечивать выигрыш в отношении "сигнал/шум" по меньшей мере на 10 дБ, что соответствует увеличению дальности действия практически в 2 раза. Как и "Бтс", новый режим предполагал программную реализацию; причем вносить изменения в конструкцию передатчика и приемника РЛС SMART-L, ее антенную систему, а также изменять уже имевшиеся режимы работы не требовалось.
В процессе моделирования работы РЛС SMART-L в режиме обнаружения баллистических ракет на увеличенной дальности были получены удовлетворительные результаты, что послужило основанием для принятия в 2003 году решения о подготовке и проведении испытаний режима на наземном образце, завершившихся в начале 2005-го и признанных успешными. В конце того же года с компанией "Талес" было подписано соглашение, предусматривавшее подготовку ФР УРО "Тромп" ВМС Нидерландов к морским испытаниям, в ходе которых планировалось оценить характеристики SMART-L в режиме "Елр" в приближенных к реальным условиях.
Эта станция имела следующие характеристики в режиме "Елр": максимальная дальность действия 480 км, обзор по азимуту 90°, по углу места – до 70°, ширина ДНА по азимуту/углу места 2,2°/8°. В данном режиме для предварительной обработки сигналов и сопровождения траектории цели, построения полной траектории, оценки координат точек пуска и падения применялось специальное программное обеспечение (ПО) "Сипат" (SYPAT – System Performance Analysis Tool). Полученные данные передавались в корабельную систему боевого управления "Гардиан" (SEWACO XI), которая распределяла их по каналам системы обмена данными "Линк-16". При применении этого ПО в масштабе реального времени формировались трехмерные изображения данных об обстановке, выводившиеся на экраны в корабельном боевом информационном центре.
В сентябре 2006 года ФР УРО "Тромп" был направлен в район Тихоокеанского ракетного полигона США (о. Гавайи), где вместе с двумя американскими ЭМ УРО принял участие в морских противоракетных учениях. В ходе них фрегат выполнял задачи по оценке характеристик станции SMART-L при обнаружении и сопровождении БР в режиме "Елр", отработке тактического взаимодействия между вождаемой ракете по линии "Линк-16".
В качестве целей использовались два типа мишеней баллистических ракет.
В ходе первого испытания полет ракеты средней дальности имитировала двухступенчатая ракета "Арав-Б" (ARAV-B – Aegis Readiness Assessment Vehicle type B), в ходе второго – ракета "Ариес", имевшая меньшую высоту в апогее. Она имитировала траекторию полета БР Р-17 "Скад".
При стрельбе "Арав-Б" в ноябре 2006 года ФР УРО "Тромп" находился в 200 км от места пуска. Корабельная РЛС SMART-L в режиме "Елр" обнаружила ракету сразу же после появления той над горизонтом и успешно сопровождала ее на протяжении большей части траектории полета, а на высоте около 150 км зарегистрировала отделение головной конусообразной части от маршевой ступени.
Второе испытание проводилось в декабре того же года в рамках учений американских ВМС "Звездный охотник", имевших целью отработку перехвата мишени БР при помощи противоракеты "Стандарт-3".
Корабли находились в 300 км от места пуска. Станция SMART-L на борту фрегата УРО "Тромп" обнаружила мишень "Ариес" и сопровождала ее на всей траектории. Данные сопровождения передавались на другие корабли по радиолинии "Линк-16", что позволило отработать их взаимодействие на тактическом уровне.
На основе полученных наработок намечалось сформировать два новых режима работы для SMART-L, находящихся на вооружении кораблей, для чего требовалось ввести в состав корабельных РЛС дополнительное вычислительное оборудование и специальное программное обеспечение. Однако эти планы до настоящего времени не осуществлены. В ходе последующей работы и оценки по критерию "эффективность/стоимость" было принято решение на базе РЛС SMART-L и полученных наработок перейти к созданию принципиально новой РЛС с цифровой активной фазированной антенной решеткой (АФАР).