Итальянская система подводного наблюдения для обнаружения малошумных целей (2021)
В. Спирин,
кандидат технических наук
Акустическая система подводного наблюдения, разработанная по программе SASSO (Sistema Acustico di Sorveglianza con Sensori Ottici) на основе антенной решетки с оптоволоконными приемниками, представляет собой продукт итальянских инженеров. Оптоволоконные приемники имеют малые размеры и работают в частотном диапазоне от 50 до 2500 Гц. Механический усилитель обеспечивает регулировку чувствительности приемников за счет применения оптоволоконных брегговских дифракционных решеток (Fibre Bragg Grating - FBG) с модифицированными оптоволоконными лазерами с обратной связью (Distributed Feed Back-Fibre Laser - DFB FL).
Каждый сенсор представляет собой лазер с оптоволоконной дифракционной брегговской решеткой, вставленный в полимерный механический усилитель, изготовленный на 3D-принтере. Сенсоры закачиваются с помощью лазера.
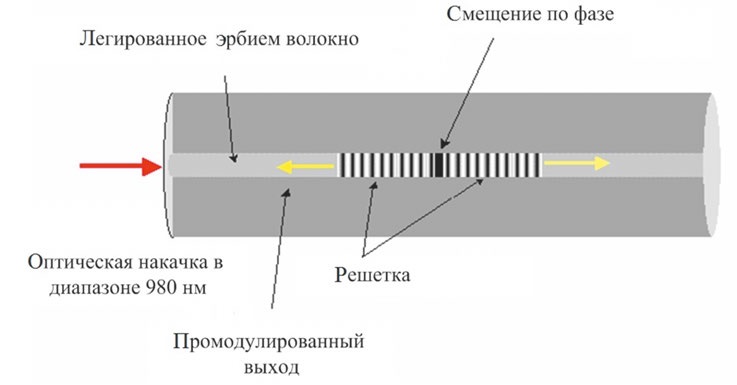 |
| Схематичный рисунок оптоволоконной брегговской дифракционной решетки DFB FL |
 |
| Схема функционирования антенны с DFB FL |
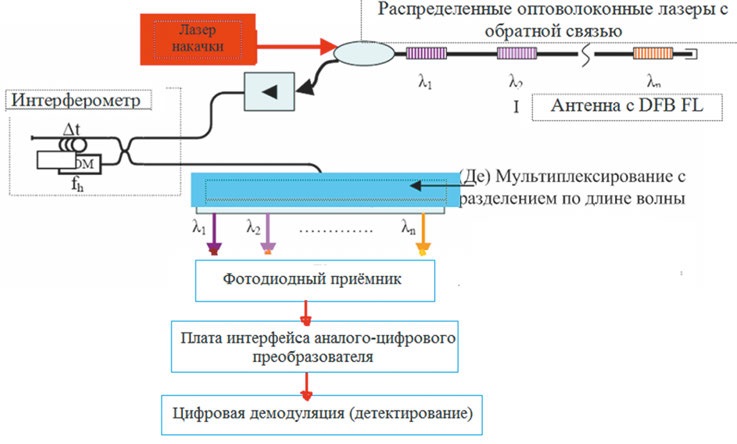 |
| Архитектура мультиплексной акустической антенны с оптоволоконными лазерами с обратной связью и соответствующей обработкой сигналов |
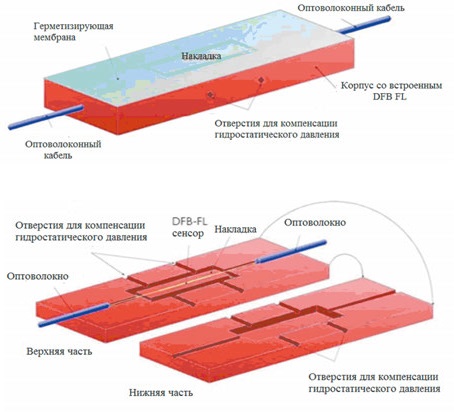 |
| Компоновка сенсора c DFB FL |
Брэгговская дифракционная решетка встроена в одномодовое оптическое волокно, содержащее активную среду (усилитель - участок оптоволокна, легированного эрбием, равен 49 мм).
Антенна с DFB FL работает как приемник, в силу того что в волокне под воздействием акустического давления создается напряжение. Из-за этого шаг брэгговской решетки меняется, а следовательно, и длина волны - λ. Это изменение фиксируется опросной системой. Длина волны лазера может быть выбрана в процессе изготовления за счет установки шага дифракционной решетки и выставлена на любом участке диапазона от 1 520 нм до 1 580 нм.
Разработанная система включает в себя антенну и оптоволоконные линии передачи данных и в совокупности может иметь протяженность 10-30 км. Антенная решетка может устанавливаться на корабле, подводной лодке, автономных подводном, надводном аппаратах и в стационарном варианте для обнаружения малошумных целей. Малые размеры приемников снижают сопротивление антенны при буксировке. На большом удалении от носителя они работают при отсутствии сильной гидродинамической помехи и потому могут обнаруживать малошумные цели на больших расстояниях.
Целью программы SASSO являлась проработка новой концепции подводного наблюдения путем применения одноразовых антенн с сенсорами нового типа.
Она основывалась на использовании интерферометрического (Fibre Optic - FO) FO-гидрофона.
Первый интерферометрический FO-гидрофон был предложен в конце 1970-х годов. Он обладал следующими достоинствами: геометрическая гибкость, возможность формирования системы из множества приемников, а также невосприимчивость к электромагнитному излучению.
Итальянские разработчики разместили миниатюрные FO-сенсоры в решетке, соединив их с платформой-носителем через оптоволоконную линию передачи данных, имеющую большую протяженность (до 30 км). Малые габариты и стоимость позволяют устанавливать такую одноразовую антенную решетку даже на носителях малого водоизмещения.
Приемник регистрирует воздействие на него акустического давления при одновременной оптической подкачке. Изменение внешнего давления вызывает флюктуации частоты лазера, которые могут быть точно измерены. Чувствительность сенсоров может регулироваться с помощью механических усилителей, например такого, как изгибная балка-накладка и полимерный охватывающий корпус (обойма).
В рамках программы SASSO проведен анализ эволюции таких сенсоров (Fiber Laser Strain - FLS), использующих изгибную балку-усилитель для обеспечения высоких характеристик при минимальной стоимости производства. По сути, это направление развития сенсоров привело к созданию нового поколения векторно-скалярных приемников на базе оптоволоконных лазеров, что способствовало появлению нового поколения систем обнаружения, в том числе малогабаритных радиогидроакустических буев.
Возможности буксируемых линейных антенных решеток ограничены гидродинамическим шумом (помехой). Поэтому патрулирование должно осуществляться при минимальной скорости хода (насколько это возможно), чтобы обеспечить максимальную дальность обнаружения. Новая концепция основывается на возможности контроля при патрулировании больших пространств, при отсутствии гидродинамической помехи на решетке и одновременном ограничении по скорости на корабле-носителе. Это реализуется за счет того, что оптоволоконная линия достигает длины 30 км и при постановке антенны скорость корабля практически равняется скорости ее разматывания. Когда кораблю необходимо перейти в другой район патрулирования, то он освобождается от антенны и там выпускает новую.
Система, разработанная в рамках программы SASSO, состоит из четырех основных блоков: "мокрой части", представляющей собой антенну из приемников FLS и соединительного оптоволоконного кабеля, систем развертывания, оптической накачки и обработки.
Чувствительность (S) сенсора (FLS) с балкой-накладкой для механического усилителя определяется промежуточной частотой С-диапазона (ν), оптоупругим коэффициентом (ez), модулем Юнга материала накладки (Е), толщиной (Т), длиной (L), приложенного к накладке давления (p), cb - скоростью звука в накладке: (Формула 1)
 |
| Формула 1 |
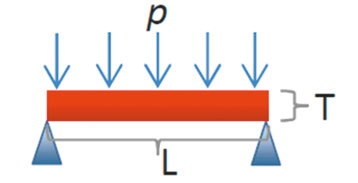 |
| Накладка |
 |
| Резонансная частота накладки: |
Выбранный материал, поликарбонат, позволил достичь теоретической чувствительности порядка 48 нм/МПа.
Компоненты для преобразователя могут быть изготовлены с помощью 3D-принтера, а сенсоры установлены в корпус без использования специального инструмента.
Размеры приемного элемента: длина 120 мм, ширина 16 мм, высота 112 мм, дают возможность сматывать и разматывать антенну на вьюшку. На рисунке отображены два приемных элемента, которые извлекаются из формы после 48 ч вулканизации в специальной выгородке с повышенной температурой.
Принятый оптикой интерферометрический сигнал с помощью электроники преобразовывается из аналоговой формы в цифровую для последующей обработки.
Минимальный детектируемый уровень для такого типа сенсора определяется спектральной чистотой лазера накачки.
В данном случае спектральная чистота накачки равна 4 х 10-11 нм/(Гц)1/2, что соответствует 19 дБμПа(Гц)1/2, а это ниже, чем шумы моря при его состоянии 0 баллов (SS0 по Кнудсену).
Способность обнаружения приемника в такой ситуации определяется только окружающей помехой. В ходе испытаний в Средиземном море было продемонстрировано резкое возрастание гидродинамической помехи при увеличении скорости буксировки антенны, что хорошо иллюстрирует таблица.
С другой стороны, согласно формуле (1) устройство действительно эффективно на частотах далеко не на резонансе накладки, который оценивается в 6 кГц. Это делает сенсор пригодным для работы на частотах ниже чем 2,5 кГц. Однако поскольку антенна работает на различных глубинах, то требуется компенсация гидростатического давления, ухудшающего характеристики приемников. Гидрофоны чувствительны только к частотам выше 50 Гц.
На одном оптоволокне можно разместить до 16 приемников и сформировать несколько линий из этого материала в одной комбинированной антенной решетке.
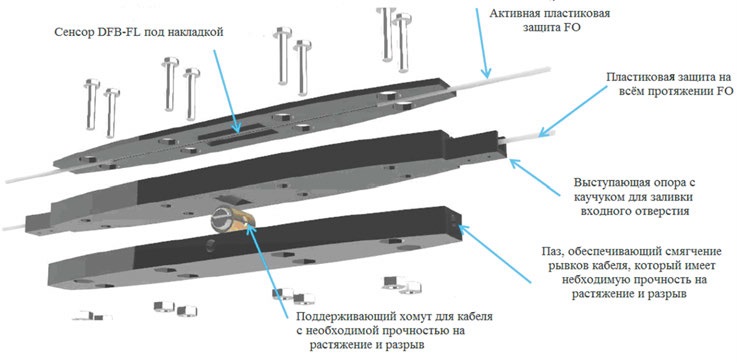 |
| Компоненты приемного элемента |
 |
| Два приемных элемента, извлекаемые из формы после вулканизации |
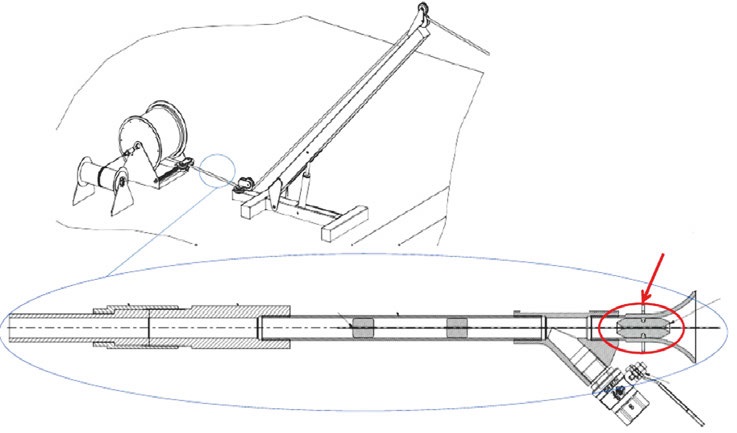 |
| Система постановки и выборки на корме надводного корабля |
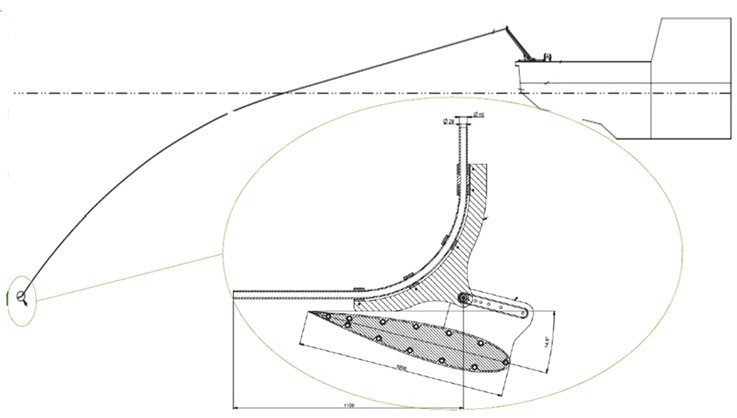 |
| Устройство гидродинамического депрессора (углубителя) |
В ходе обнаружения знание местоположения сенсоров и, по сути демонстрируемые ими векторно-скалярные характеристики используются для решения проблемы неоднозначности пеленга.
Бортовая система выпуска и выборки такой антенны незначительно отличается от других используемых систем, за исключением того, что она имеет меньшие массу и габариты.
Испытания антенны показали, что FLS сенсоры демонстрируют на низких частотах лучшие характеристики в отличие от пьезоэлектрических преобразователей.
Они могут быть скомпонованы в виде легкой, компактной и недорогой буксируемой решетки для автономных подводных аппаратов, подводных лодок или временно действующих стационарных систем наблюдения. При патрулировании большой акватории антенна может быть развернута в центре ее и благодаря высокой чувствительности и отсутствию гидродинамической помехи вести мониторинг обстановки, обеспечивая кораблю возможность свободного маневра.
При благоприятной гидрологии дальность обнаружения такой антенны составит более 30 км, и она будет работать до удаления корабля на дистанцию длины буксирного кабеля. Дальность обнаружения целей может быть увеличена при разворачивании носителем нескольких антенн в различных точках акватории и использовании мультистатической обработки сигналов.
Антенна может применяться при защите портов и баз, мониторинге окружающей среды, фауны, сейсмической активности, а также при регистрации техногенных шумов.
|
Таблица Значения уровня помех на антенне при буксировке (состояние моря по Кнудсену) |
|||
| Скорость буксировки, уз | Частота 100 Гц | Частота 200 Гц | Частота 300 Гц |
| 15 | SS6 + 20 дБ | SS6 + 5 дБ | SS3 + 5 дБ |
| 12 | SS6 + 13 дБ | SS3 + 5 дБ | ~ SS3 |
| 9 | SS6 + 8 дБ | ~ SS3 | SS1 + 10 дБ |
| 6 | SS6 + 5 дБ | SS1 + 10 дБ | ~ SS1 |