Системы боевого управления надводных кораблей ВМС Германии (2010)
Капитан 3 ранга Е. Маслов
На современном этапе корабельные системы боевого управления (КСБУ) представляют собой крупномасштабные сложные вычислительные комплексы, в которых важная роль отводится программному обеспечению, Выбор архитектуры построения этих систем определяется общими тенденциями развития информационных технологий. Они создаются на тех же принципах, что и широкий класс систем управления, таких, например, как системы управления производством и распределением электроэнергии, управления движением, организации биржевой торговли.
Одной из основных особенностей рассматриваемого класса систем является то, что они строятся по распределенному принципу и имеют многоуровневую архитектуру.
В распределенных системах помимо аппаратной части, которая представлена различным оборудованием, подключенным к сети, операционных систем, управляющих работой оборудования, прикладной части, определяющей совокупность задач, выполняемых системой (функциональность системы), появляется уровень промежуточного программного обеспечения. Этот уровень, расположенный между уровнями прикладных программ и операционных систем, отвечает за создание и поддержание представления о том, что оборудование, соединенное сетью, является единой системой. За счет использования промежуточного слоя система значительно проще поддается расширению н модернизации, так как этот уровень скрывает все изменения, происходящие на уровнях операционных систем и аппаратуры от уровня прикладных программ и наоборот.
Данные принципы были положены в основу при разработке корабельных систем боевого управления фрегатов УРО типа "Заксен" (проект 124), а затем корветов проекта К. 130 и фрегатов УРО проекта F 125 ВМС Германии. При этом КСБУ фрегатов типа "Заксен" по своей архитектуре подобна системе TACTICOS, которая является дальнейшим развитием французской TAV1TAC 2000 и голландской STACOS.
Проект создания фрегатов УРО типа "Заксен" явился результатом двустороннего сотрудничества Германии и Нидерландов в рамках программы строительства фрегатов нового поколения, открытой в начале 1990-х годов. В ходе работы над проектом особое внимание уделялось корабельной системе ПВО, в состав которой предполагалось включение наиболее совершенных радиолокационных средств -- 3-см многофункциональной РЛС APAR и РЛС обнаружения воздушных целей (ОВЦ) SMART-L частотного диапазона 1-2 ГГц.
Соглашения о разработке программного обеспечения (ПО) для СБУ фрегатов типа "Заксен" были подписаны в 1996 и 1997 годах. В работах по созданию ПО, которые продолжались более пяти лет, участвовали пять компаний: "Рентеон", "Т-Системз", "Талес", EADS и STN АР". Основная часть программ была разработана фирмой EADS. отвечавшей также за интеграцию системы.
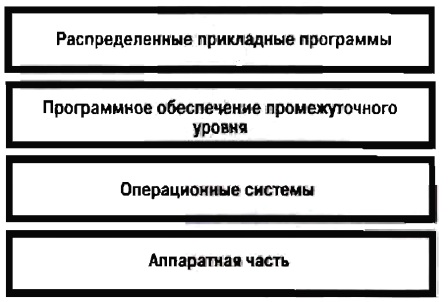 |
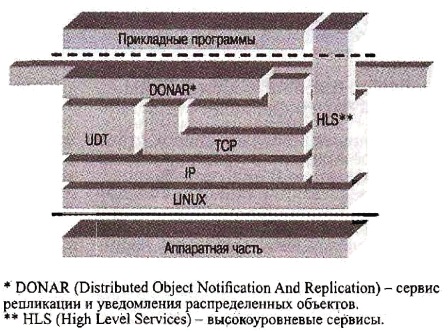
| Пример многоуровневого представления архитектуры системы |
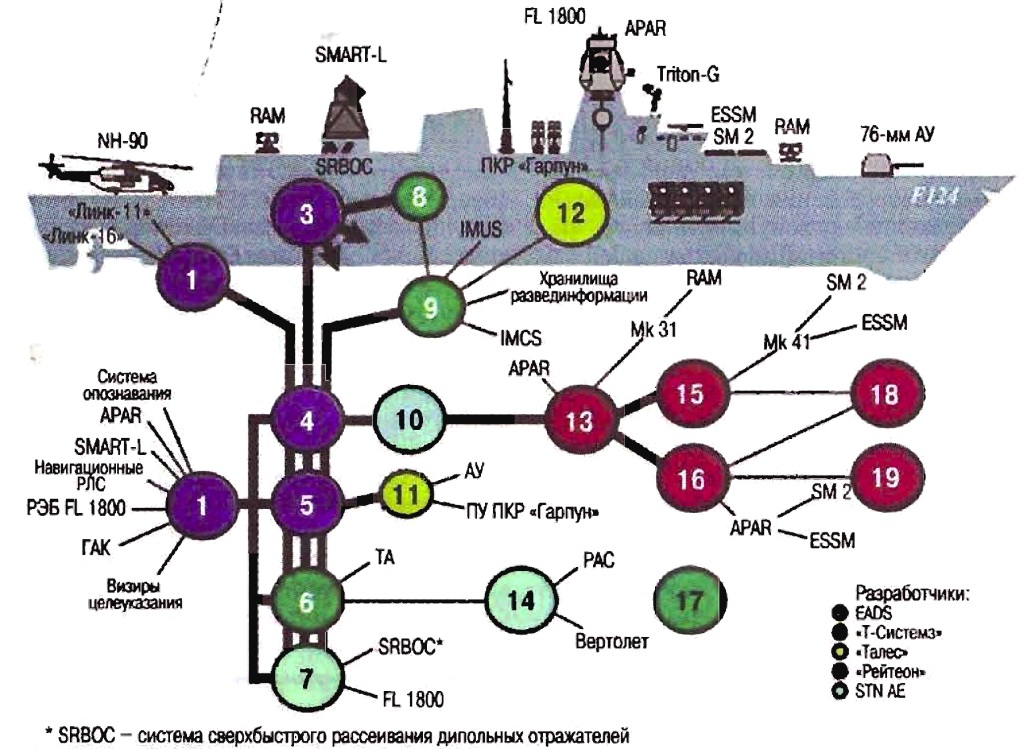 |
| Основные элементы программной конфигурации и их взаимосвязи: 1 - программные средства в системах передачи данных "Линк"; 2 - программы совместной обработки данных; 3 - интерфейс пользователя; 4 - средства анализа воздушной обстановки; 5 - средства анализа надводной обстановки; 6 - пакет программ анализа подводной обстановки; 7 - управление средствами и системами РЭБ; 8 - экспертная система и оценка алгоритма действий; 9 - сбор сводных данных об обстановке; 10 - разработка алгоритма действий при решении задач ПВО; 11 - управление огневыми средствами поражения НК; 12 - управление на уровне боевой группы; 13 - управление огнем средств ПВО; 14 - управление воздушным движением; 15 - контроль пуска ракет; 16 - управление полетом ЗУР; 17 - обеспечение навигации; 18- стандартный интерфейс; 19 - уточнение траектории движения зенитной ракеты |
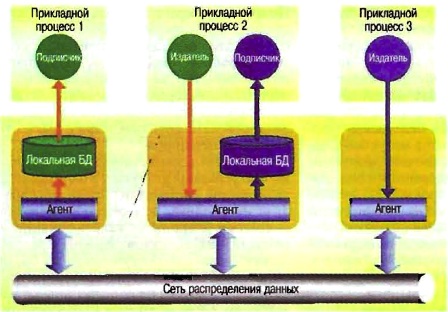 |
| Основное компоненты архитектуры SPLICE |
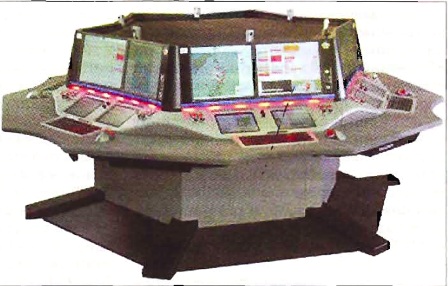 |
| Групповой пульт семейства OMADA, планируемый к установке в БИЦ фрегатов проекта F125 |
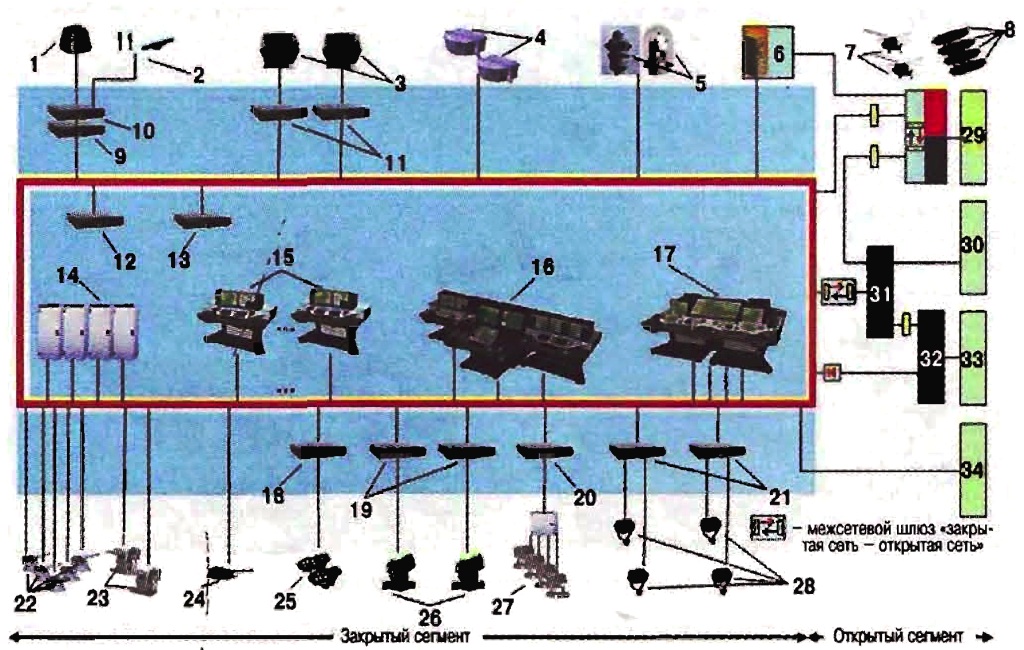 |
| Состав элементов системы боевого управления фрегатов УРО проекта F125: 1 - РЛС TRS-3D NR; 2 - навигационная РЛС; 3 - оптоэлектронная cucmeмa контроля воздушной обстановки и лазерного целеуказания MIRADOR; 4 - ИК-система панорамного обзора SIMONE; 5 - система РЭБ MAIGRET S5000A; 6-криптографическая защита тактических радиосетей "Линк"; 7 - вертолеты; 8 - лодки (4 единицы); 9 - модуль системного интерфейса (МСИ) станции TRS-3D 1VR; 10 - МСИ навигационной станции; 11 - МСИ ОЭС MIRADOR; 12 - сетевой МСИ артиллерии; 13 - сетевой МСИ средств и систем РЭБ; 14 - стойки для размещения вычислительного оборудования; 15 - индивидуальные рабочие места операторов; 16 - рабочие места группы управления; 17 - групповые рабочие места; 18 - МСИ пусковых установок ПКР "Гарпун"; 19 - МСИ пусковых установок ЗРК RAM; 20 - МСИ комплексов ПП и ЛЦ MASS; 21 - МСИ системы предупреждения о лазерном облучении в коротковолновой части диапазона - NLWSW; 22 - 12,7-мм ЗАУ "Хитроле" (5 единиц); 23 - 27-мм АУ MLG-27 (2 единицы); 24 - 127-мм АУ "Эледжерито Компакт" (облегченная версия); 25 - ПУ ПКР "Гарпун"; 26 - ПУ ЗУР RAM (2 единицы); 27 - комплексы ПП и ЛЦ MASS; 28 - система NLWSW (4 единицы); 29 - система передачи информации и связи; 30 - система планирования и контроля тылового обеспечения; 51 - мультисервисная широкополосная сеть; 32 -навигационные сети; 33 - навигационное обеспечение; 34 - единый Web-портал информации об обстановке |
 |
| Архитектура системы боевого управления фрегатов УРО проекта F125 |
Если рассматривать систему боевого управления в комплексе всех задач, которые она решает на корабле, то в ее структуре может быть выделено восемь основных функциональных контуров, обеспечивающих ПВО, ПКО, ПЛО, боевое управление (Combat Direction System), управление средствами РЭБ, обмен данными в тактических радиосетях "Линк", навигацию и связь (IMUS). Каждый из них имеет определенную аппаратную конфигурацию, представленную датчиками и объектами управления, и программную конфигурацию, куда относятся пакеты программ обработки информации, управления средствами поражения, взаимодействия с оператором и другие.
Например, элемешы аппаратной конфигурации (hardware configuration item) контура противовоздушной обороны представлены корабельной многофункциональной РЛС, станцией обнаружения воздушных целей и системой опознавания, а в качестве объектов управления - установкой вертикального пуска Мк41 (ЗУР "Стандарт-2" и "Усовершенствованная Си Спарроу") и пусковыми установками ЗРК RAM. Элементами программной конфигурации (software configuration item) этого же сегмента являются пакеты программ совместной обработки, данных (data fusion), анализа воздушной обстановки, выработки алгоритма действий, управления огневыми средствами ПВО и интерфейс пользователя.
Функции тех или иных элементов аппаратной и программной конфигурации также могут быть представлены как набор отдельных, независимых друг от друга операций.
Как показано на схеме, в элемент, отвечающий за совместную обработку, стекается информация от всех корабельных датчиков. В ходе совместной обработки осуществляется построение единых траекторий движения наблюдаемых объектов и вычисление взаимных привязок траекторий, оцениваются условия окружающей среды с последующей передачей полученных данных в соответствующие компоненты анализа обстановки (подводной, надводной, воздушной) и управления средствами РЭБ.
Совместная обработка информации, поступающей от корабельных радиолокационных станций, входящих в структуру системы ПВО, и сопровождение воздушных целей осуществляются на основе многогипотезного метода (multihypothcsis tracking) с использованием алгоритма согласования адаптивных моделей маневрирования (adaptive interactive manoeuvre models) и обобщенной (расширенной) фильтрации Кальмана. Для сопровождения маневрирующих целей используются три фильтра, настроенных на три модели движения целей. Они работают в сочетании с алгоритмом согласования моделей.
Один фильтр настроен на модель равномерного движения (например, левый координатный разворот с постоянной скоростью), а два других настроены на модели координатного разворота, при этом выполняется адаптивная подстройка угловой скорости разворота (это могут быть, например, модели, описывающие такие типы разворотов, как равноускоренный и равнозамедленный левый разворот и др.). Большое разнообразие моделей, описывающих типы движения объекта, позволяет охватить полный набор возможных изменений скоростей и направлений разных целей (самолетов и ракет при выполнении различных маневров движения, надводных целей).
Для совместной обработки информации о параметрах целей, поступающей от активных и пассивных датчиков (например, от многофункциональной РЛС, РЛС ОВЦ и системы радиотехнической разведки), предусмотрен специальный процесс ее отождествления.
Помимо непосредственно обработки информации элемент совместной обработки отвечает за управление работой многофункциональной РЛС, а также отслеживает уровень ее загрузки. Управление работой РЛС осуществляется путем выработки для этой станции специальной программой-диспетчером запросов (управляющих сообщений) на дополнительный поиск (search request). Запросы содержат данные целеуказания и формируются в автоматическом режиме по информации от станции SMART-L на основе отметок, обнаруживаемых станцией за один обзор. При этом запрос формируется только по результатам предварительного анализа поступающей информации и после оценки уровня опасности обнаруженного объекта.
По команде оператора диспетчер формирует запросы по стробам оптического визира (по каждому отдельно). Мониторинг состояния рабочей нагрузки на многофункциональную РЛС ведется во избежание ее перегрузки, которая возникает вследствие поступления очень большого количества запросов. Эта функция может быть отключена оператором.
От элемента совместной обработки данных информация поступает в блок анализа тактической обстановки. Процедуры анализа необходимы для оказания помощи оператору в процессе классификации и опознавания объектов. Анализ предполагает сравнение поступающей из блока совместной обработки информации о траекторных и других параметрах объектов с записями, содержащимися в базе данных. Сама она имеет гибкую конфигурацию и хранит информацию, поступающую от программы - диспетчера правил (доктрин), а также вводимую оператором. Алгоритм, применяемый в процессе анализа, основан на методе Демпстера-Шафера.
На следующем этапе обработки с использованием всей имеющейся информации об объектах оценивается степень их опасности. Эта информация необходима при разработке программы действий.
Элемент разработки программы действий формирует плановую таблицу применения огневых средств того или иного назначения, которая передается для исполнения в программные компоненты управления оружием, а также для оценки вероятности поражения целей. Разработкой программы действий руководит диспетчер правил (экспертная система). Программа может быть использована на уровне как корабля, так и боевой группы. Во втором случае предварительно выполняется анализ всех имеющихся в ее распоряжении средств.
В блоке совместной обработки предусмотрены также процедуры, позволяющие анализировать взаимосвязи между обнаруженными, классифицированными и опознанными объектами и информацией об объектах, полученной по каналам систем передачи данных "Линк-11" и "Линк-16". Прием данных осуществляется системой управления и обработки сообщений IMUS (Integrated Message Handling & Control System). Доступ к ней возможен с пультов, расположенных в боевом информационном центре и на мостике.
В системе боевого управления фрегатов УРО типа "Заксен" (как и в системе TACTICOS) в состав ПО промежуточного уровня входит модель согласования SPLICE (Subscription Paradigm for the Logical Interconnection of Concurrent Engines). Она была запатентована в конце 1980-х годов компанией "Холландзе сигнаалагша-ратен" (в настоящее время "Талес"), и вот уже более десяти лет данная архитектура успешно применяется в распределенных системах управления, разрабатываемых этой фирмой. SPLICE реализует механизм "публикации по подписке" (publish-sub-scribe) на данные. Такой механизм подразумевает, что ни поставщикам данных, ни подписчикам на них нет необходимости знать друг о друге, за счет чего уменьшается связность системы. В этой модели значительное внимание уделяется независимости прикладных процессов, что дает ряд преимуществ по сравнению с более жесткими архитектурами, где имеется больше встроенных связей.
В модели SPLICE применяется разделяемое пространство данных, которое может быть организовано при помощи совместно используемой или распределенной базы данных. В общем случае основными компонентами архитектуры модели являются: автономные прикладные процессы, которые могут выступать как в роли издателей (publisher), то есть поставщиков каких-либо данных, так и в роли подписчиков (subscriber), то есть потребителей; агенты и локальные базы данных (ЛБД), а также сеть распределения данных. Сеть распределения, агенты и ЛБД отвечают за их доставку всем прикладным процессам-подписчикам.
Инфраструктура SPLICE (агенты. ЛБД и сеть) обеспечивает доступ к данным за счет их распределения в реальном масштабе времени, которое занимает тысячные доли секунды (менее 0,5 мс), а частота их уточнения может достигать нескольких тысяч обновлений в секунду. Такие рабочие параметры хорошо согласуются с требованиями, предъявляемыми к КСБУ, особенно в тех ситуациях, когда от корабельных датчиков поступают большие объемы информации об обстановке. В подобных условиях в каждой ЛБД может быть воссоздана полная картина окружающей обстановки, а прикладные процессы могут использовать эти данные для выполнения своих функций независимо друг от друга.
Архитектура SPLICE обеспечивает также высокую надежность выполнения приложений. Это достигается благодаря тому, что информация о работе приложения тоже хранится в общей базе данных и распределяется по другим локальным базам данных. Так что в случае отказа процессора, на котором выполняется приложение, оно может быть запущено на другом узле.
В СБУ фрегатов УРО типа "Заксен" подключение корабельных источников информации н управляемых объектов к локальной сетевой магистрали, работающей в асинхронном режиме передачи (155 Мб/с) в масштабе реального времени, осуществляется через модули магистрального интерфейса (всего их 12). Данные модули позволяют скрыть особенности внутренней структуры подключаемых подсистем, что, в свою очередь, ведет к снижению рисков интеграции, вероятность возникновения которых очень высока при использовании подсистем более ранней разработки (например, установки вертикального пуска Mk41), имеющих очень сложные интерфейсы. Этим подсистемам модули интерфейса с магистралью предоставляют стандартный интерфейс обращения к распределенной базе данных (data based oriented interface) и стандартный коммуникационный протокол. Помимо снижения уровня рисков такое решение позволяет управлять изменениями подсистем, что имеет большое значение для боевого корабля в связи с продолжительным сроком его жизненного цикла.
Модули магистрального интерфейса (BIU - Bus Interface Unit) и многофункциональные пульты (всего 17 пультов, подсоединенных к локальной магистрали) включают в себя вычислительные многопроцессорные платы. Первоначально использовались процессоры SPARC 5. а в более поздний период - SPARC 50, работающие под управлением операционной системы VxWorks. В общей сложности в системе насчитывается свыше 100 процессоров SPARC 50, а также 17 DEC Alpha.
Позднее отмечалось, что выбор процессорной архитектуры сначала в пользу SPARC 5, а затем SPARC 50 не являлся верным. В частности, на момент разработки системы управления данная процессорная архитектура уже не служила ориентиром в развитии микропроцессорной индустрии. Такой выбор объяснялся тем, что решение по составу аппаратной части системы было принято слишком рано, уже на начальных этапах ее создания, когда его изменение повлекло бы дополнительные инвестиции. Это обстоятельство было учтено в ходе работ над СБУ корветов проекта К 130, выбор вычислительного оборудования для системы управления которого задерживался до самого последнего момента.
Помимо корабельной вычислительной сети, к которой подключаются датчики и объекты управления, на фрегатах типа "Заксен" проложена сеть распределения видеоинформации, поступающей от корабельных средств наблюдения за обстановкой на многофункциональные пульты.
По своей архитектуре система боевого управления корветов проекта К 130 в целом подобна СБУ фрегатов проекта 124. В ней используется часть программного обеспечения, предназначенною для фрегатов, но разработан и ряд новых программ в силу специфики структуры датчиков и объектов управления.
Так же как и на фрегатах типа "Заксен", на корветах проекта К 130 автоматизацию управления работой корабельных обеспечивающих средств осуществляет общекорабельная система контроля и управления - IMCS (Integrated Monitoring and Control System). Распределенные системы такого типа, выполняющие функции управления главной энергетической установкой корабля, вспомогательными механизмами, средствами контроля боевых повреждений и др. в реальном масштабе времени, связаны с КСБУ. Доступ к IMCS может быть обеспечен с пультов операторов СБУ.
Общекорабельная система контроля и управления представляет собой больше чем просто средство дистанционного управления. Она позволяет поддерживать высокий уровень автоматизации выполнения ряда задач и контроля работы обеспечивающих систем, осуществляет сбор и обработку информации от датчиков, размещенных во внутренних помещениях корабля, а также распределение управляющих сигналов на объекты управления. На фрегатах типа "Заксен" (водоизмещением 6000 т) насчитывается около 8 тыс. датчиков, а на корветах, водоизмещение которых не превышает 2000 т, - до 7 тыс. Кроме того, в IMCS предусмотрена система, предназначенная для распределения видеоинформации, которая поступает от камер, расположенных в отдельных отсеках корабля. Видеоинформация распределяется при помощи специально предназначенной для этого сети.
Все элементы системы IMCS, в число которых помимо основных элементов - многофункциональных пультов управления и удаленных терминалов - входят местные панели управления и другие блоки, имеют доступ к разделяемой базе данных. Элементы связаны между собой сетью.
Необходимо отметить, что в состав системы наблюдения кораблей данного проекта будут включены новые датчики: радиолокационная станция TRS-3D NR частотного диапазона 4-8 ГГц и комплекс РЭБ MAIGRET S 5000А.
Связь между источниками информации и объектами управления осуществляется через закрытый сегмент (контур) сети. К закрытому контуру сети подключаются также пульты операторов. На фрегатах УРО проекта F 125 планируется применять пульты нового поколения - OMADA.
Открытый контур - мультисервисная широкополосная сеть - имеет аналогичную организацию и строится на тех же компонентах, что и закрытая сеть, но связывает все подсистемы, которые не имеют доступа к секретным данным. Мультисервисная (универсальная) широкополосная сеть позволяет оказывать ряд дополнительных услуг (кроме обычных услуг внутренних корабельных открытых сетей). Они варьируются от услуг развлекательного характера (музыка, видео) до доступа к системе противопожарной защиты, проверки запоров дверей и люков, контроля атмосферы в жилых помещениях и др. Для обеспечения более комфортных условий пребывания экипажа на корабле возможности сети позволяют оборудовать каждую каюту аппаратурой для отдыха. Идея мультисервисной широкополосной сети заимствована из аналогичных разработок для пассажирских судов.
Перенос данных между двумя сегментам-ми сети и контроль требований по защите информации возложены на специальные межсетевые шлюзы, Разработкой шлюзов, получивших- название RSGate, занимались две немецкие компании GeNU А и INFODAS. Аналогичные средства используются Также на корветах проекта К 130.
Сетевые интерфейсы с подсистемами выполнены на базе протокола TCP/IP, при этом для большей части корабельных датчиков уже не требуется специальное преобразование данных. Модули BIU получили свое дальнейшее развитие в модулях системного интерфейса (System Interface Unit), основным назначением которых является уже не преобразование различных данных, поступающих от подсистем к единому формату коммуникационного протокола, а предоставление дополнительного вычислительного ресурса подсистемам.
Корабли проекта F 125 частично будут использовать ПО корветов проекта К 130 и фрегатов типа "Закcен". Кроме того, разрабатывается ряд новых программных модулей. Особое внимание уделяется программам планирования и ведения огневого подавления противника в ближней зоне, а также воссоздания картины оперативной обстановки в этой зоне.
В системе управления фрегатов F125 будет использована архитектура СБУ ANCS (Advanced Naval Combat System), применявшейся впервые на катерах ВМС Финляндии.
Механизм публикации и подписки в данной архитектуре реализует сервис репликации и уведомления распределенных объектов DONAR, расположенный на промежуточном уровне. Основной его частью является служба репликации (тиражирования) данных. Доступ к тиражируемым данным может быть получен на каждом узле локально, за счет чего отпадает необходимость обращения в сеть, Объектная репликация позволяет повысить устойчивость системы к повреждениям и отказам. DONAR образует дополнительный уровень поверх CORBA (общая архитектура брокера запросов к объектам), Служба репликации и уведомления распределенных объектов использует CORBA для транспортировки данных, а также предоставляет возможности групповой рассылки, когда это необходимо.
Зарубежное военное обозрение. 2010, №8, С.77-83